Supplementary Material
For:
Simulation of Digital
Camera Images
From Hyperspectral
Input
- Philippe Longère
- David H. Brainard
- Department of Psychology
- University of California,
Santa Barbara
-
- This chapter appears in: Vision Models and Applications to Image and Video
Processing, C. van den Branden Lambrecht (ed).
-
Download chapter: simchapter.ps
or simchapter.pdf
Because it was not possible
to include color plates in the printed chapter, we have provided
color versions of a number of the figures here.
- Figure
1.4: This shows a
color version the hyperspectral image illustrated in Figure 1.4.
At each pixel of the hyperspectral image we computed the LMS
cone responses. We then rendered the LMS image using the basic
rendering method described in the chapter and calibration data
for an Apple 20" color monitor.
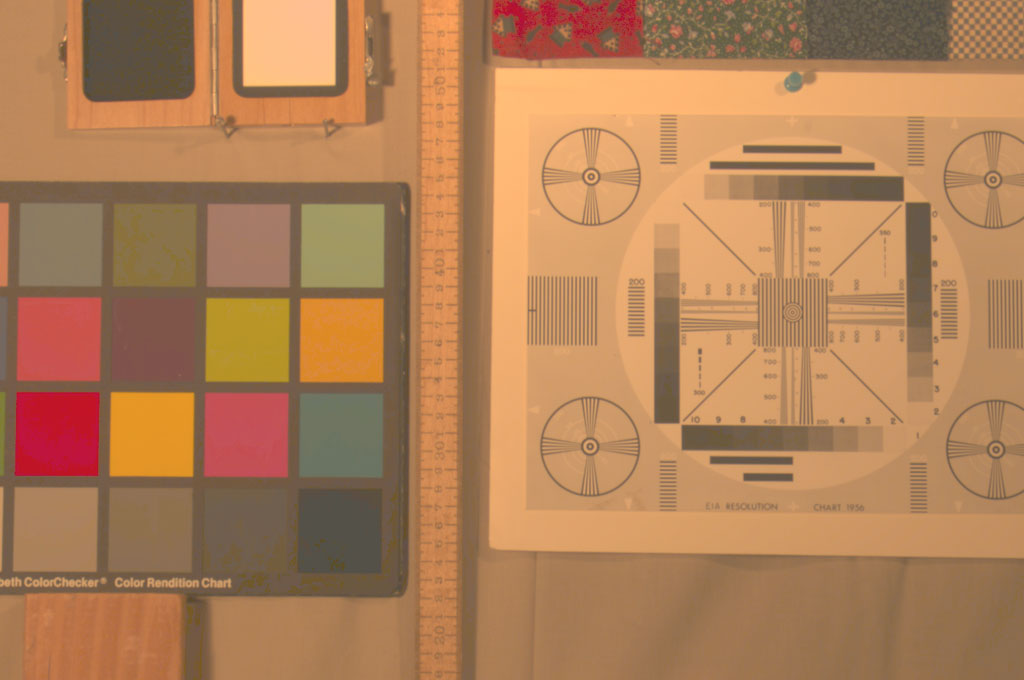
- Fig
1.12: The top image
shows a real image obtained with the Kodak DCS-200 color camera.
Bilinear interpolation was used to demosaic the image. No color
balancing was applied, the RGB camera values are displayed directly.
The bottom image is a simulation of the top image obtained from
high-resolution hyperspectral data.
- Fig.
1.14: Color version
of Figure 1.14.
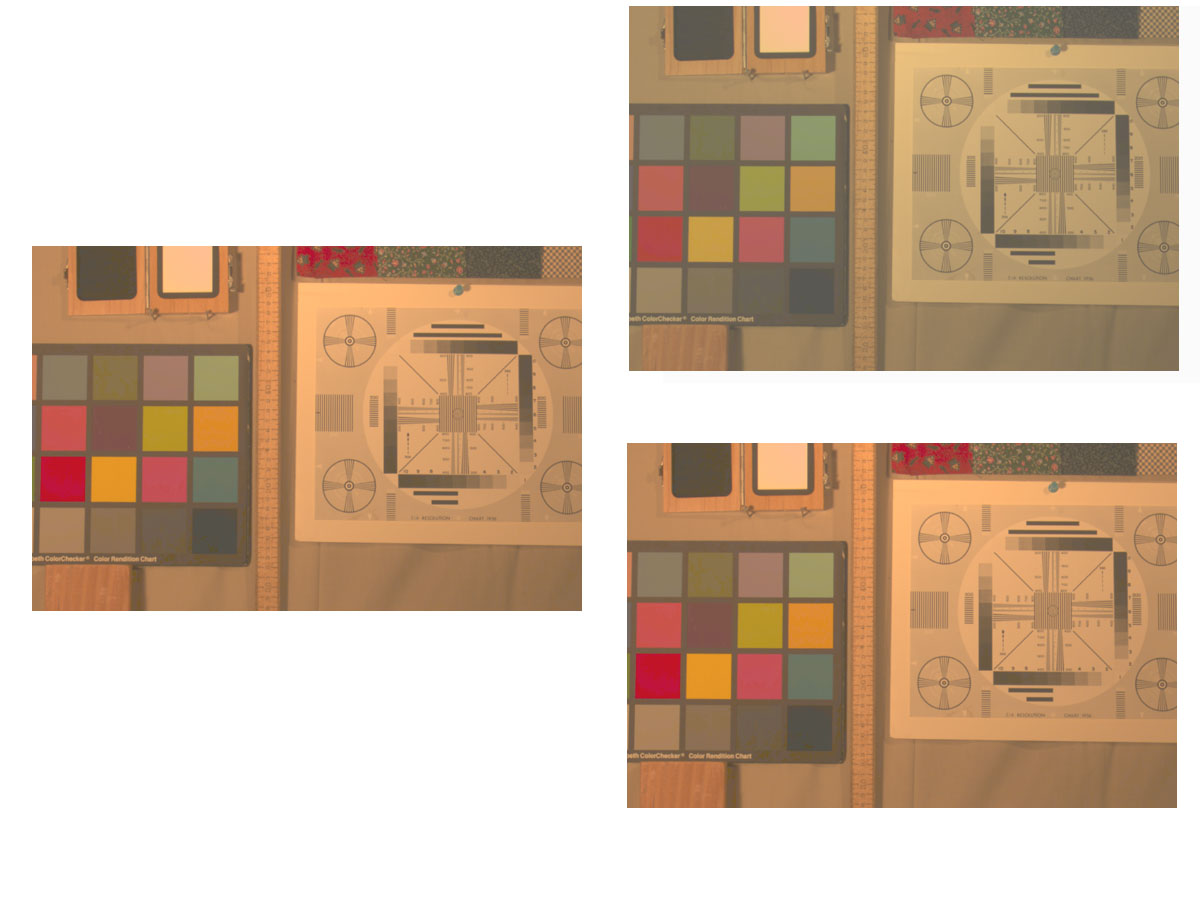
- Supplementary
Figure: The two images
on the left side show are close ups extracted from the bottom
panel of 1.12 above and illustrate mosaicing artifacts. The corrresponding
images on the right are for comparison. These were generated
by simulating a non-mosaiced version of the DCS-200 camera.
- Supplementary
Figure: The figure
shows a pictorial summary of Figure 1.19. The left panel shows
the rendered image obtained (with either method, no noise) when
parameter alpha is set to zero. The right panel shows the basic
rendering (top) and the illuminant-based rendering (bottom) when
parameter alpha is set to one.
Hyperspectral data available at: http://color.psych.upenn.edu/hyperspectral.
David Brainard: 03/19/12.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}